마이크로칩테크놀로지(한국대표: 한병돈)는 직관적인 제스처 기반 비접촉 사용자 인터페이스를 구현할 수 있는 GestIC® 기술을 발표하였다.

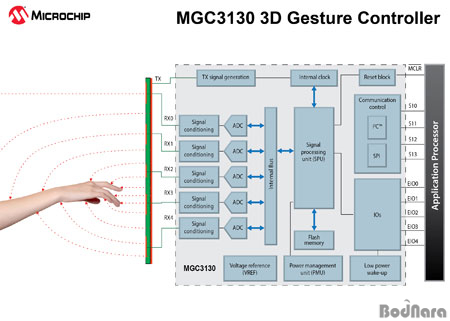
GestIC® 기술이 탑재된 MGC3130는 전기장(E-field) 기반의 컨피규레이션이 가능한 3D 제스처 컨트롤러로, 자유공간(free-space) 제스처를 인식해 기존보다 적은 전력 소모만으로 정확하고 빠르게 손 위치 추적(hand position tracking) 기능을 제공한다. MGC3130에 대한 프리젠테이션 자료는 여기에서 확인 가능하다.
MGC3130 3D는 능동감지 상태에서 150 마이크로와트 정도의 전력을 소비하여 배터리를 사용하는 제품에서도 상시 제스처 인식이 가능하며, 카메라 기반의 제스처 시스템보다 최대 90%까지 전력소모량을 줄일 수 있다.
한편 GestIC® 기술은 콜리브리 스위트(Colibri Suite)라고 불리는 온-칩 라이브러리를 통해 인간의 제스처를 직관적이면서 자연스럽게 인식할 수 있도록 지원한다. 콜리브리 스위트는 스토캐스틱 HMM(Hidden Markov Model)과 x/y/z 축의 손 위치 벡터를 통합해 기존보다 탑재하기 용이한 3D 핸드 및 핑거 제스처 인식이 가능하다. 근접하면 켜지는 기능(Wake-Up on Approach), 위치 추적, 손가락 튕기기 제스처, 원그리기 제스처와 함께 심볼 제스처에 해당하는 전원 on/off, 애플리케이션 열기, 포인트, 클릭, 줌, 스크롤, 프리-스페이스 마우스오버 등의 다양한 제스처 인식이 가능하다.
또한 GestIC® 기술은 PCB 선로나 터치센서의 ITO(산화 인듐-주석) 코팅 같은 도전 재료들로 만들어진 얇은 감응 전극을 이용하여 디바이스의 하우징 내에서 통합할 수 있어 저렴한 시스템 가격으로도 심미적인 제품 디자인이 가능하며, 100%의 표면 점유율을 제공하여 다른 기술에서 발견되는 앵글의 사각지대를 제거한다. 그리고 MGC3130은 15cm 범위까지 탐지할 수 있으므로 스크린 터치 방식과 달리 호버링 동작도 구현 가능하다. |


















